Un espoir pour les patients atteints de déficits moteurs graves
Mise à jour de la page : le 25/10/2022
Titre du projet : Contrôle d’un exosquelette chez la souris par la plasticité corticale
Porteur du projet : Luc ESTEBANEZ – Institut des Neurosciences Paris-Saclay (Neuro-PSI)
Montant : 50 000 €
Le projet est conjointement soutenu par la Fondation Dassault Systèmes et la FRC. L’expertise scientifique a été assurée par le Conseil Scientifique de la FRC.
« Par ce projet, je veux contribuer au défi qui consiste à redonner une autonomie aux patients souffrant de déficits moteurs lourds en développant un dispositif robotique qui va être couplé avec une interface cerveau-machine. Ce financement m’a permis d’initier un projet hautement interdisciplinaire que je n’aurais pas pu financer autrement. Il m’a aussi permis en accumulant des données préliminaires de déclencher l’obtention d’un second financement pour enclencher la pleine réalisation de ce projet » – Luc Estebanez
Description du projet
Pour les patients atteints de déficits moteurs graves dus à des paraplégies ou des maladies neurodégénératives, le contrôle du corps ou la communication avec l’extérieur sont difficiles. Le développement d’une orthèse* connectée et contrôlée directement par le cerveau permettrait la restauration des capacités motrices chez des patients atteints de ce type de trouble. Cette avancée technologique pourrait leur offrir un espoir de regagner de l’autonomie en contrôlant un bras robotique via l’activité neuronale enregistrée dans leur cortex moteur. Les dispositifs d’interface cerveau-machine (ICM, aussi connu sous le terme BMI) ainsi développés fonctionnent en liant directement le cerveau à un robot.
Les progrès vers l’utilisation de tels robots sont cependant fortement ralentis par l’absence de modèle animal pré-clinique permettant d’explorer efficacement les nombreuses questions levées par le contrôle d’un robot directement par le cerveau. Pour combler ce manque, l’équipe de Luc Estebanez propose de concevoir et de réaliser un bras robotique similaire à une patte avant de souris. Cette structure sera dotée de capteurs de force et de toucher (permettant ainsi un « retour sensoriel »), afin de pouvoir être piloté par une interface cerveau-machine. Ce type de bras robotique n’existe actuellement pas. Des travaux préliminaires ont été réalisés avec succès par cette équipe de recherche.
Ce financement va permettre la conception et la réalisation du robot nécessaire à ce projet. Une collaboration avec l’équipe de mécatronique de Samer Alfaya (UVSQ) permettra d’utiliser l’impression 3D pour réaliser la structure d’un bras robotisé miniature qui sera équipé de moteurs et de capteurs miniatures à faible coût. Cela permettra d’étudier le fonctionnement (réactions aux commandes motrices, retour sensoriel) de ce type d’orthèse et permettra au long terme le développement d’orthèse adaptée à l’humain. Le succès de ce projet offrira aux patients la possibilité d’accomplir de façon autonome des tâches du quotidien.
*appareil ou dispositif qui a pour objectif de soutenir ou rendre plus fonctionnel un membre.
Les équipes
Ce projet est porté en collaboration par deux équipes complémentaires :
- L’équipe de neurosciences « Traitement sensoriel, neuromodulation et plasticité neuronale » dirigée par Daniel Shulz (Directeur de recherche CNRS) qui se spécialise dans l’intégration somatosensorimotrice dont Luc Estebanez fait partie.
- L’équipe de Samer AlFayad (Université Versailles Saint Quentin-Laboratoire d’ingénierie des systèmes de Versailles). Cette équipe de concepteurs robotiques a développé un savoir-faire dans la fabrication robotique qui lui permettra de réaliser le robot miniature nécessaire au projet.
Photographie de l’équipe porteuse du projet
Les résultats
Le développement de la prothèse est très avancé, le matériel et le logiciel ont été validées, et elle dispose de 4 degrés de liberté fonctionnels. Par ailleurs, une première version du contrôle de la prothèse par interface cerveau-machine a été implémentée avec une prothèse virtuelle, et plusieurs études ont été menées pour identifier la structure optimale du retour optogénétique (activation d’une cellule par une lumière spécifique) appliqué sur le cortex dans le cadre du contrôle de la prothèse par le cerveau.
Grâce à un financement additionnel de la Fondation Dassault Systèmes, un doctorant dédie sa thèse à la finalisation de la structure mécanique et du logiciel de contrôle de la prothèse, et il travaille actuellement à la connexion de la prothèse avec l’interface cerveau-machine.
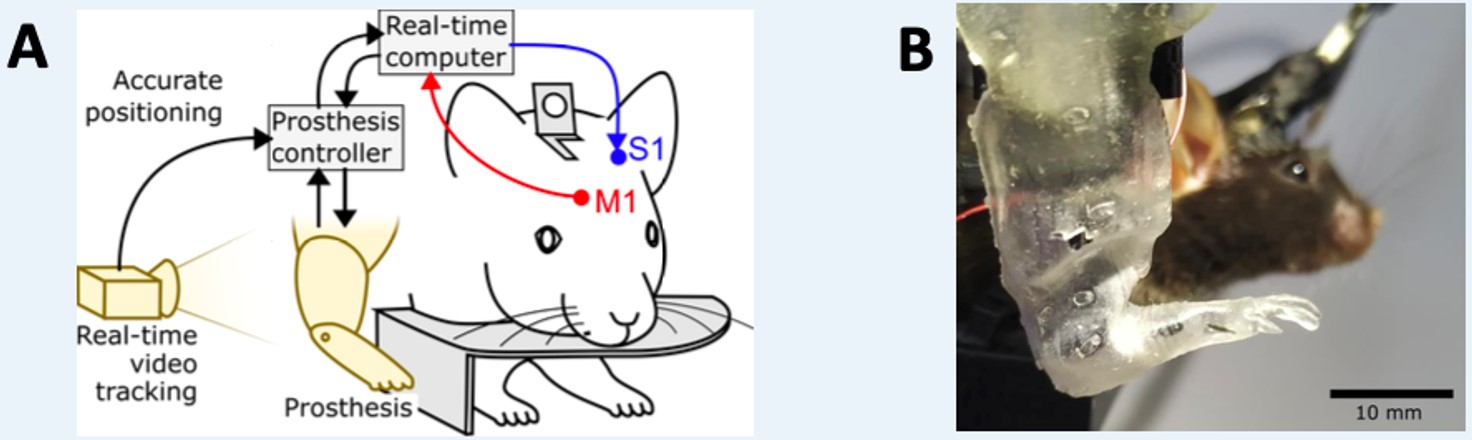
L’étape finale de développement consiste à rendre la prothèse contrôlable par une souris en utilisant une interface cerveau-machine. A) Schéma de l’interface cerveau-machine. B) La prothèse connectée et contrôlée par l’activité des neurones du cortex moteur.
Les publications
Deux articles ont été publiés :
L’ambition de La Fondation Dassault Systèmes est de soutenir une économie de l’intelligence collective accessible au plus grand nombre possible d’enseignants, étudiants et chercheurs. C’est pourquoi elle offre un soutien aux projets innovants d’organisations à but non lucratif qui œuvrent pour l’Éducation, la Recherche scientifique et le Patrimoine.

Le Dr. Luc Estebanez est Chargé de Recherche CNRS à l’Institut des Neurosciences Paris-Saclay (Gif-sur-Yvette), au sein de l’équipe du Dr. Daniel Shulz. Il s’intéresse à la façon dont les informations sensorielles sont intégrées au contrôle moteur et développe des interfaces cerveau-machine capables de transmettre des informations dans les deux sens, c’est-à-dire à la fois capables de lire des commandes motrices issues du cerveau, et de lui transmettre en retour des informations d’ordre sensoriel.

Le centre de recherche
Ce projet est mené par une équipe de l’Institut des Neurosciences Paris-Saclay (Neuro-PSI)

"Plasticité et réparation : réparer le cerveau et/ou la moelle épinière"
► Voir tous les projets financés par la FRC en 2018 sur ce thème